为了更深入理解卷积神经网络,这篇博客介绍在卷积神经网络中常用的卷积操作底层是如何实现的。
卷积
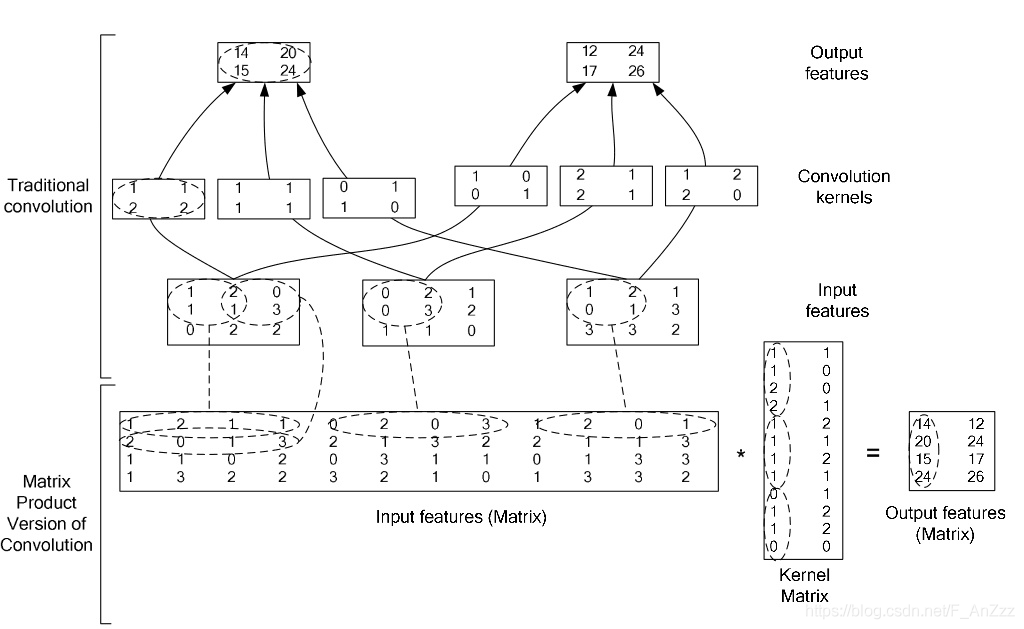
卷积本身的执行过程是通过在特征图上滑动卷积核来完成的,如下面两个动图,形象地展示了单通道卷积和多通道卷积操作。
单通道卷积

多通道卷积

多通道卷积计算底层实现
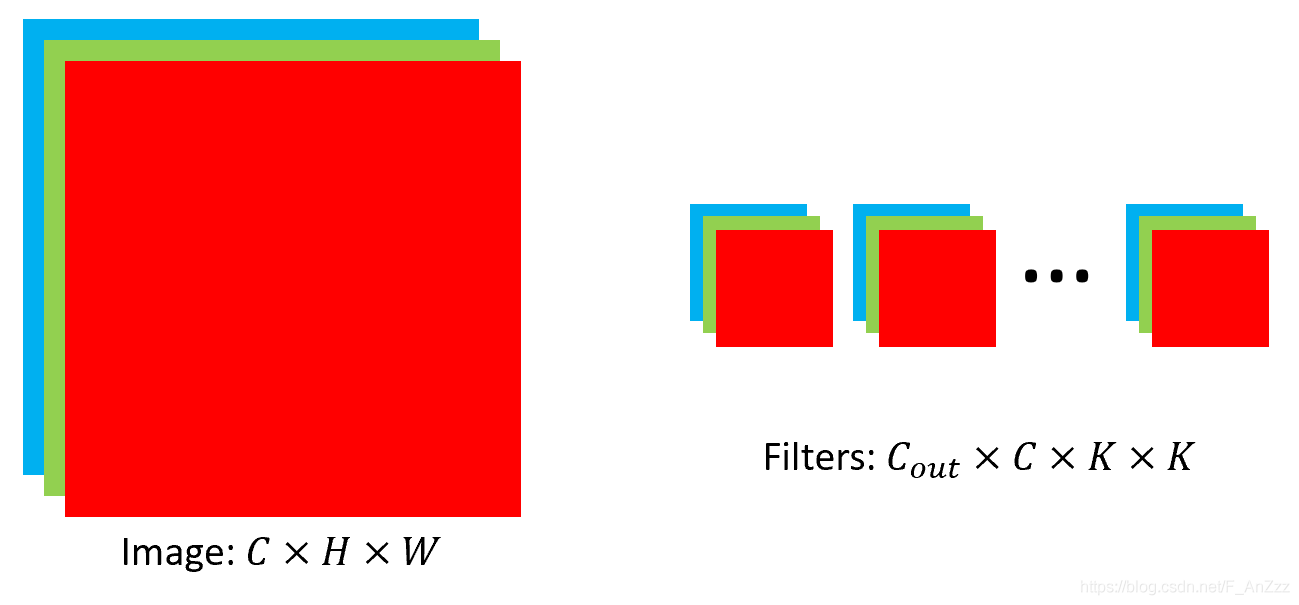
假设输入图像及卷积和大小如下图所示:
第一步:分别将特征图和卷积转换为矩阵
卷积核
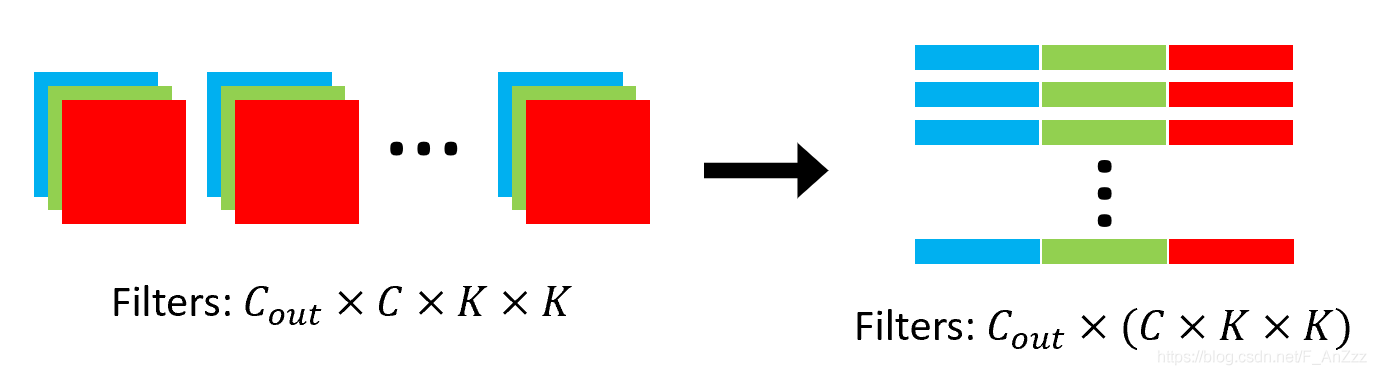
对于2D卷积,本身是四维的卷积核,将其转换为二维由$C_{\text {out }} \times C \times K \times K$变为$C_{\text {out }} \times M$,其中$M=C \times K \times K$。
例如,如下卷积核的维度是$2 \times 3 \times 2 \times 2$,分别为 filter 1 和 filter 2。
$$ \left[\begin{array}{ll} 1 & 1 \\ 2 & 2 \end{array}\right]\left[\begin{array}{ll} 1 & 1 \\ 1 & 1 \end{array}\right]\left[\begin{array}{ll} 0 & 1 \\ 1 & 0 \end{array}\right] $$
$$ \left[\begin{array}{ll} 1 & 0 \\ 0 & 1 \end{array}\right]\left[\begin{array}{ll} 2 & 1 \\ 2 & 1 \end{array}\right]\left[\begin{array}{ll} 1 & 2 \\ 2 & 0 \end{array}\right] $$
转换成$C_{\text {out }} \times M$矩阵为$2 \times 12$大小,如下: $$ \left[\begin{array}{llllllllllll} 1 & 1 & 2 & 2 & 1 & 1 & 1 & 1 & 0 & 1 & 1 & 0 \\ 1 & 0 & 0 & 1 & 2 & 1 & 2 & 1 & 1 & 2 & 2 & 0 \end{array}\right] $$
特征图
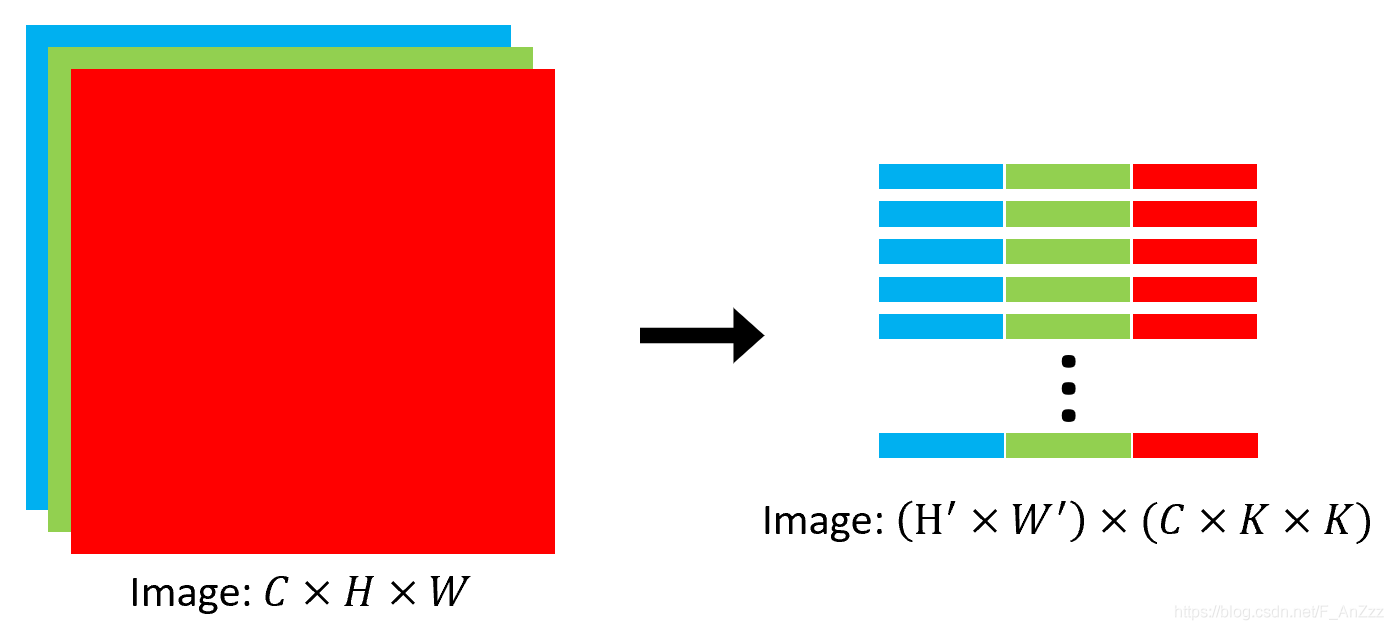
对于输入为$C \times H \times W$的特征图, 将其转换为$\left(H^{\prime} \times W^{\prime}\right) \times(C \times K \times K)$的矩阵。其中$H^{\prime}$和 $W^{\prime}$为输出特征图的长和宽。与卷积核kernel的变换不同,feature map不是单纯将矩阵resize一下就行, 而是要根据卷积核的尺寸、与特征图的作用过程需要的stride和padding,从输入特征中选择相应的值组成转换后的矩阵。
例如, 假设输入的特征图的大小为 $3 \times 3 \times 3$, 特征图为:
$$
\left[\begin{array}{lll}
1 & 2 & 0 \
1 & 1 & 3 \
0 & 2 & 2
\end{array}\right]\left[\begin{array}{lll}
0 & 2 & 1 \
0 & 3 & 2 \
1 & 1 & 0
\end{array}\right]\left[\begin{array}{lll}
1 & 2 & 1 \
0 & 1 & 3 \
3 & 3 & 2
\end{array}\right]
$$
采用 $2 \times 2$ 卷积核, stride为 $1$, padding为 $0$ ,转换得到如下:
$$
\left[\begin{array}{llllllllllll}
1 & 2 & 1 & 1 & 0 & 2 & 0 & 3 & 1 & 2 & 0 & 1 \
2 & 0 & 1 & 3 & 2 & 1 & 3 & 2 & 2 & 1 & 1 & 3 \
1 & 1 & 0 & 2 & 0 & 3 & 1 & 1 & 0 & 1 & 3 & 3 \
1 & 3 & 2 & 2 & 3 & 2 & 1 & 0 & 1 & 3 & 3 & 2
\end{array}\right]
$$
这样, 最终的计算结果就变成了
$F \times C^{T}=\left(\left(H^{\prime} \times W^{\prime}\right) \times(C \times K \times K)\right) \times\left(C_{\text {out }} \times(C \times K \times K)\right)^{T}=\left(H^{\prime} \times W^{\prime}\right) \times C_{\text {out }}$
整体的流程可以简化为
 下面用代码实现上面卷积过程:
下面用代码实现上面卷积过程:
| |
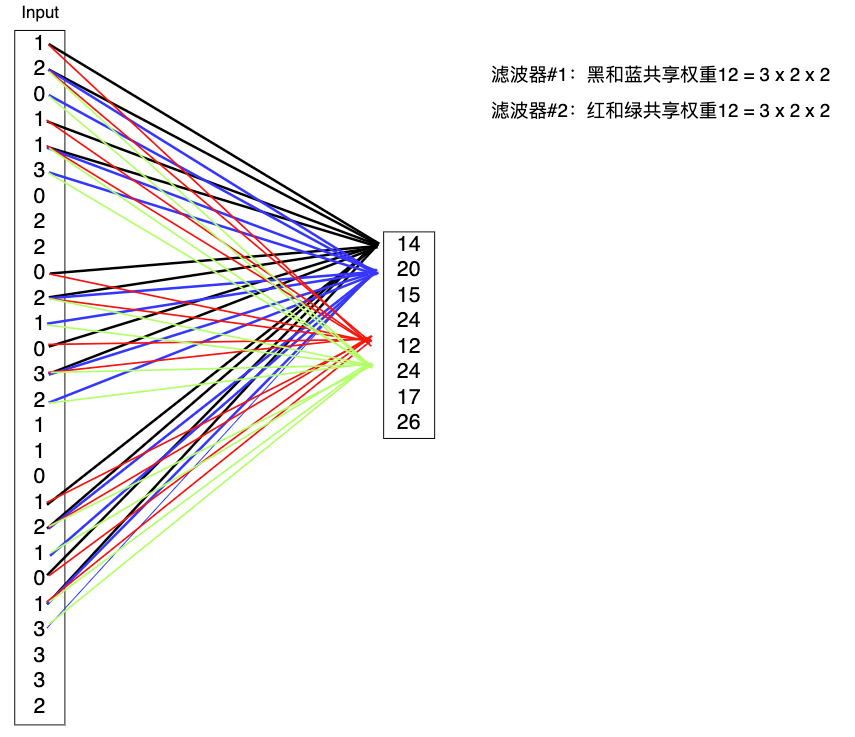
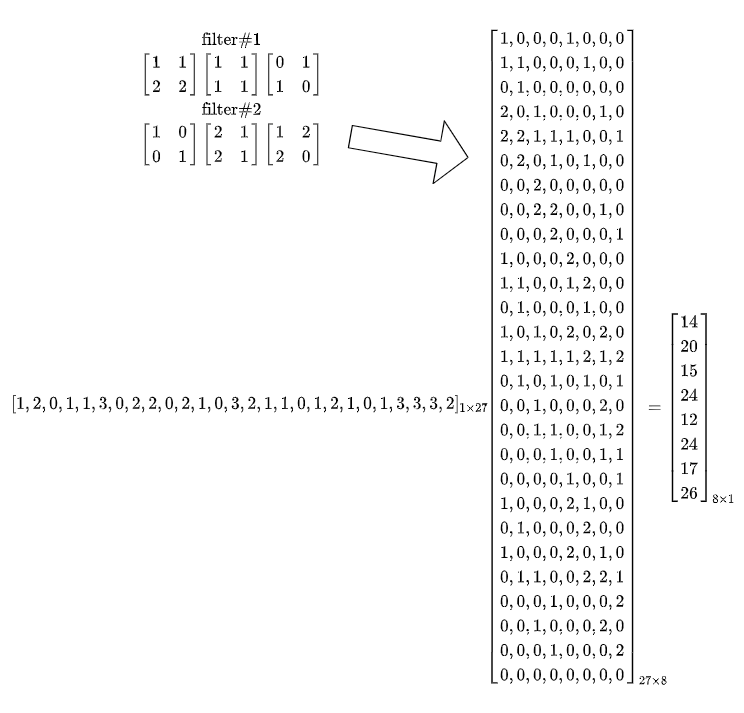
如果把特征图按照行优先展开为一维向量,那么对应的卷积操作如下:
总结与分析
- 输出层的节点值并不是由全部输入层的节点值与权重乘积和得到,而只有部分输入节点参与到计算;从另一的角度可以当成是有一部分权重为零。
- 有大量权重被共享,有几个滤波器就共享了几套权重参数,这点原因应该是空间平移不变性,即某一区域和另一区域并没有差别。
- 上面将所有特征图拉成一维向量,这样只是和全连接层做对比,实际上,因为图像数据存在多通道,例如一般情况下的RGB三通道图像,每个通道包含一个维度的信息;另外图像中像素点之间的位置信息在二维图像中可以更好的呈现(编码),而拉成一维向量会丢失这些信息。
- 从信息论角度来说,三通道图像是否有图形的信息存在冗余。
参考:
更新记录
调整格式和排版。 —— 2022.07.19